
























作品詳情
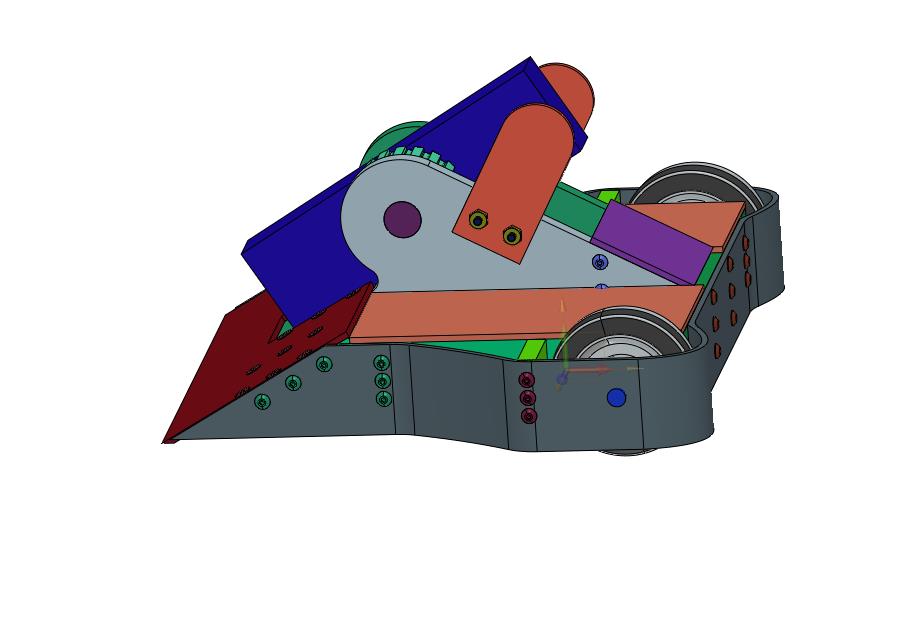
前部伺服擺動桿的爬動爬樓梯小車,其核心部件為伺服擺動桿,通過伺服控制系統(tǒng)精確控制擺動角度和速度。該裝置使得小車在爬樓梯時,能夠靈活適應(yīng)不同梯級的高度和寬度。通過爬動方式前進,有效應(yīng)對復(fù)雜地形和環(huán)境的挑戰(zhàn)。其專業(yè)設(shè)計確保了運動的穩(wěn)定性和負載能力,為高效、安全的爬樓梯運輸提供了可靠支持。
全國咨詢熱線: 152 1011 0562 



平diy桌面級快速成型3D打印機")






動臺袋子印畫設(shè)備")







