
























作品詳情
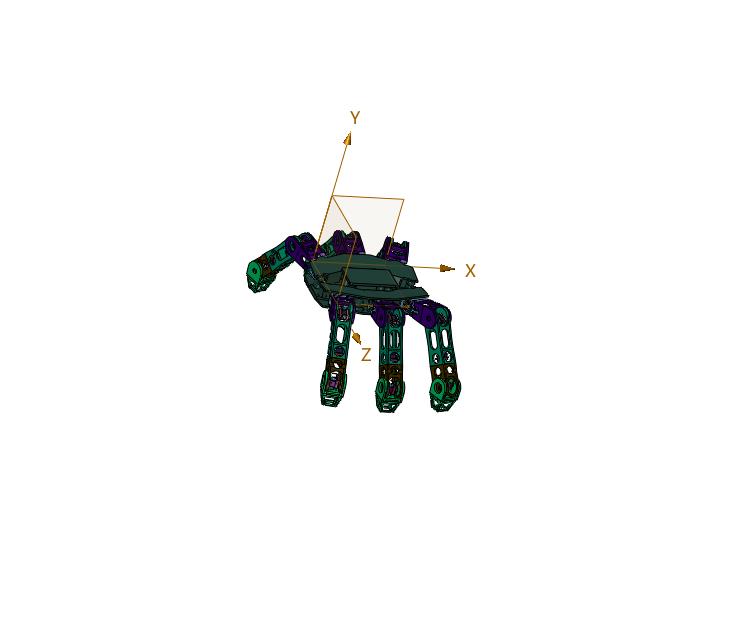
全地形作業(yè)六足爬行機甲是一種高度專業(yè)化的陸地移動工具,具備六條可獨立控制的腿足,能夠在各種復(fù)雜地形環(huán)境中高效爬行和作業(yè)。該機甲具備出色的越野能力、穩(wěn)定性和負載能力,適用于多種惡劣環(huán)境和特殊任務(wù),如救援、勘探、農(nóng)業(yè)等。其設(shè)計結(jié)合了機械工程、電子控制、材料科學(xué)等多個領(lǐng)域的前沿技術(shù),為現(xiàn)代科技應(yīng)用帶來了極大的便利。



平diy桌面級快速成型3D打印機")






動臺袋子印畫設(shè)備")








