
























作品詳情
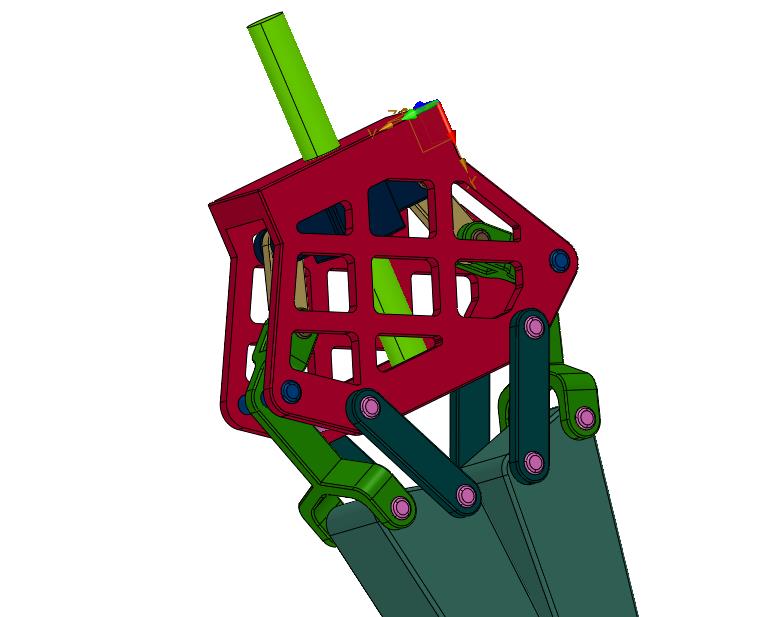
機器人自適應(yīng)抓取夾爪是一種智能機械裝置,能夠根據(jù)目標物體的形狀、尺寸和材質(zhì)等因素進行自動識別和靈活調(diào)整。它具備高度敏感的環(huán)境感知能力,通過先進的傳感器和算法實現(xiàn)精準定位與抓取。夾爪能夠自適應(yīng)變化,以適應(yīng)不同形狀和尺寸的物體,提高抓取效率和準確性。此外,它還具有優(yōu)良的操控性和穩(wěn)定性,確保在復(fù)雜環(huán)境下完成精準抓取任務(wù)。



平diy桌面級快速成型3D打印機")






動臺袋子印畫設(shè)備")








