
























作品詳情
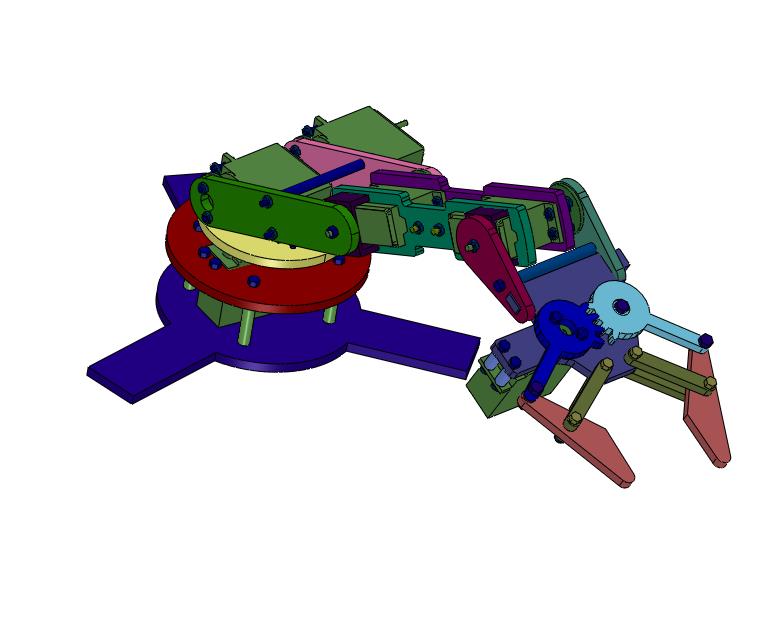
工業(yè)搬運工手臂模型機器人是一種高效、精確的自動化工具,其設計模擬人類手臂,具備靈活的關節(jié)和強大的抓取能力。這種機器人能夠執(zhí)行重負載搬運、精準定位放置等任務,適用于各種工業(yè)環(huán)境。其關鍵特點包括高效的工作循環(huán)、耐用性強的構建材質、精準的控制系統(tǒng)以及強大的負載能力。此外,該機器人還能根據(jù)實際需求進行定制,滿足不同的工業(yè)生產需求。



















